Seite 1 von 6
Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Freitag 8. Mai 2020, 15:24
von Sir Quickly
Hallo zusammen,
nachdem ich bereits einige Zeit in der Einkocherklasse unterwegs war und diesen auch erfolgreich mittels CraftbeerPi automatisiert hatte, bein ich in die jetzt in die 50-Liter-Klasse gewechselt, bestehend im wesentlichen aus einem 50l-Kessel von Brewpaganda, befeuert mit einer Yato-Platte, 38l-Thermoport sowie Einkocher für den Nachguß.
Natürlich wollte ich den Komfort der Automatisierung nicht missen und habe mich deshalb an den
Umbau der Platte gemacht, um diese mit meiner CraftbeerPi-Steuerung betreiben zu können.
Ich bin ja nicht der erste, der dieses erfolgreich umgesetzt hat, aber ich möchte trotzdem hier mal den
Umbau vorstellen, vielleicht enthält er ja den ein oder anderen interessanten Aspekt.
Es gibt es ja mehrere Ansätze für die Automatisierung, u.a. da Schalten der Netzspannung via Ralais oder Schütz. Dies hat ja u.a. den Nachteil dass die Lüfter (die Yato hat ja zwei davon, im Gegensatz zur
Hendi) nicht nachlaufen, die Einschalt-Stoss-Ströme stressen die Eingangs-Kondensatoren und ich finde es halt auch eleganter, die eh schon vorhandene Kontroll-Logik der Platte zu nutzen. Aber das ist Geschmackssache. Und, last but not least, es ist keine Leistungsregelung der Platte möglich.
Ich habe mich deshalb für eine (minimal-)invasive Version, in der die Mimik des Drehgebers mittels einer Schaltung nachgebildet wird, entschieden.
Im Vorfeld hatte ich die Möglichkeit, mir eine
Hendi-Platte mal von innen anzuschauen. Beide Platten,
Hendi und Yato, scheinen vom selben Induktions-Chinesen zu stammen, zwar unterschiedliche Spulen und Hauptplatinen, auf beide Platinen ist BETTER als Hersteller gedruckt, die Kontroll-Mimik scheint sehr ähnlich zu sein, die Platine mit dem Dregeber ist sogar identisch. Der
Umbau funktioniert also für beide Platten gleichermaßen.
Hier seht ihr den Ausgangszustand der Yato:
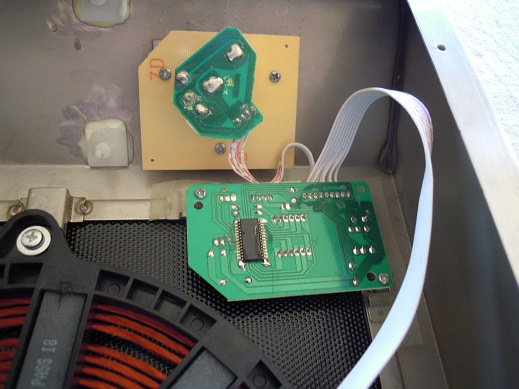
- Ausgangszustand_klein.jpg (78.69 KiB) 19087 mal betrachtet
Der Drehgeber und der Controller mit der LED-Anzeige sitzen auf zwei getrennten Leiterplatten, die über das kurze Flachbandkabel mit dem roten Aufdruck verbunden sind. Und hier kann man sich wunderbar mit der eigenen Schaltung einklinken.
Bevor es weitergeht zur Schaltung, noch ein paar
warnende Worte: Die Elektronik der Platte arbeitet auf 230V Netzpotential, d.h. eine Berührung mit der Elektronik kann böse ausgehen und schlimmstenfalls tödlich enden. Die Elektronik steht immer unter Spannung, sobald der Netzstecker gesteckt ist, unabhängig vom Ein/Aus-Schalter des Potis. Und auch nach dem Abziehen des Netzsteckers können noch geladenen Kondensatoren für gefährliche Spannungen sorgen.
Auch darf keine Signal der Schaltung, auch kein Kleinsignal, das Gehäuse berühren. Auch das kann tödlich ausgehen, aber diesem Fall eher für die Platte.
Deshalb sollte man schon wissen, was man tut und dieser Artikel ist nicht als Anleitung oder Ermunderung zum
Umbau gedacht, sondern als Beschreibung, wie ich es gemacht habe.
Die Schaltung soll dabei Folgendes erfüllen:
- galvanische Trennung der Steuersignale von der Elektronik der Platte
- Ein/ Aus-Schalten via Steuersignal.
- die Leistung soll optional fernsteuerbar sein, wird das Signal nicht genutzt, soll volle Leistung gefahren werden
- ein manueller Betrieb soll möglich sein, um die Platte auch ohne Steuerung nutzen zu können
Rausgekommen ist dann folgende Schaltung:
Sie funktioniert so:
Am Stecker J1 liegen die Signale der Fernsteuerung, bei mir RaspberryPi.
J2 hat die Signale der originalen Drehgeberplatine, J3 geht weiter an die Controllerplatine.
Abhängig vom Ein-/Ausschalter am Poti auf der Frontplatte wird nun entweder J2 vom Multiplexer U3 durchgeschalten, dann ist ein normaler manueller Betrieb mit Leistungsregelung via Poti möglich.
Ist die Platte am Poti ausgeschalten, wird auf die Fernsteuermimik von J1 durchgeschalten. Die müssen wir uns noch etwas genauer anschauen:
Das Signale
On_ext (An/Aus) und
Pwr_Ctrl_Ext >(Leistungs Regelung) werden über die Optokoppler U1A und U1B vom Rest der Schaltung isoliert.
Man beachte, dass die Optokoppler eine eigene Versorgung (+5VD und GNDD) von J1 bekommen, die auf keinen Fall mit den 5V und der Masse der restlichen Schaltung verbunden weden darf.
Das Ein/Aus-Signal wird direkt über den Multiplexer geschleift.
Pwr_Ctrl_Ext ist ein PWM-Signal, welches durch den Tiefpass R3/C1 gleichgerichtet wird. Über das Tastverhältnis Ein/Aus des digitalen PWM-Signals wird die analoge Spannung erzeugt, die, über den Multiplexer U3 geschaltet, von der Yato zur Leistungsregelung benötigt wird.
Aufgebaut auf Lochrasterplatte sieht das bei mir dann folgendermaßen aus:
Man beachte dabei den Graben, bei dem die Lötaugen abgefräst sind. Dies ist notwendig um eine ausreichend Kriechstrecke zwischen Ein- und Ausgangsseite der Isolation durch die Optokoppler zu gewährleisten.
Gedacht war die Lochrasterplatte ursprünglich nur als Prototy, deshalb auch die opulenten Ausmaße und ich wollte mit eine gelayoutete Leiterplatte machen. Aber nichts hält bekanntlich länger als ein Provisorium.
Eingebaut ist die Platine dann auf dem linken Bild zu sehen:
Befestigt ist die Leiterplatte mit so selbstklebenden Abstandshaltern für LP, auf dem rechten Bild zu sehen, wobei ich den standardmäßigen Klebepads, speziell bei höheren Temperaturen, nicht vertraut und deshalb die Sockel mit 2k-Epoxi, angedickt mit Baumwollflocken als Thixotropiermittel, eingeklebt habe.
Ausreichend Luftstrecke zwischen den Enden der Bauteilfüßchen ser Platine und Gehäuse muß dabei beachtet werden.
Auf die Verkabelung sollte man auch ein spezielle Augenmerk richten, kommt ein Leiter z.B. in einem Fehlerfall mit der internen Elektronik in Berührung, kann Netzpotential am Steckverbinder nach außen anliegen.
Das Kabel zwischen externem Steckverbinder und Leiterplatte ist mit Klebesockeln für Kabelbinder, ebenfalls mit Epoxi eingeklebt, befestigt.

- Verlegung_Kabel.jpg (70.46 KiB) 19087 mal betrachtet
Und zuletzt noch der Steckverbinder.
Nach eher gemischten Erfahrungen mit den 3,5mm-Klinkensteckern aus dem Audiobereich habe ich mich für ein M8-Einbaubuchse entschieden. Die M8-Familie kommt aus dem Sensor-/Aktor-Bereich, was ja genau zum Anwendungfall hier passt. Es ist sicherlich nicht die billigste Lösung, allerdings war mir Zuverlässigkeit und Robustheit wichtiger und Wackelkontakte gehören durch die verschraubten Steckverbindungen der Vergangenheit an.
Ach ja, die umgebaute Yato ist bei mir jetzt ca. ein Jahr bei geschätzt 10 Suden ohne Probleme im Einsatz.
So das wars hier erstmal, vielleicht kann mit dem Bericht der Eine oder Andere ja was anfangen.
Sollte die Corona-bedingte Langeweile weitergehen, werde ich ich in einem separaten Thread mein Erweiterungs-Board für den Raspberry zur Brausteuerung vorstellen.
Viel Spaß,
Roland
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Freitag 8. Mai 2020, 17:25
von DarkUtopia
Ich habe sowas ähnliches gemacht. Ich hab mit nem Arduino den Drehregler nachgebaut. Deine Version gefällt mir aber sehr gut!
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Dienstag 19. Mai 2020, 13:01
von JoGr
Hallo
Ich habe ne Yato und suche schon lange nach solch einem Interface. Welches Plugin verwendest du denn in cbpi und wie/wo ist das dann angeschlossen?
Grüße
Joachim
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Freitag 22. Mai 2020, 21:41
von Sir Quickly
Hallo JoGr,
Ansteuern tu ich die Platte mit Raspberry und CraftbeerPi 3.
Eigentlich brauchts kein Plugin, die Platte heizt bei mir praktisch nicht nach und die Temperatur schwingt dadurch praktisch nicht über. Ansonsten halt das PIDArduino Plugin.
Ich habe mir ein eigenes Board für den Pi entwickelt.
Die Leiterplatte sollte möglichst kompakt sein, damit ich die Steuerung in einem Standard-RaspberryPi Gehäuse passt.
Die Bilder unten zeigen die ge-layoutetet, aber unbestückte Leiterplatte. Im rechten Bild ist die Platine zur Veranschaulichung einfach auf auf einen PI gesteckt.
Rausgekommen ist dann eine Box, kaum größer als eine Zigarettenschachtel, wie auf den Bilder unten gesehen. Leider fehlt eine Referenz für die Größe.
Ich hatte schon viel Freude an der Steuerung, bis jetzt läuft sie absolut stabil.
Gruss,
Roland
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Sonntag 24. Mai 2020, 10:19
von dmq
Sehr gute Arbeit @Sir Quickly.
Kannst Du mir ggf. sagen welche M8 Du verwendet hast - Stecker + Buchse (Bezugquelle). Auch wäre ich an der Befestigung interessiert - das sieht nach in etwa aus wie ein Zahnrad? In vielen Konstruktionen werden die XLR-Stecker verwendet. Ich arbeite auch lieber mit den M-Typen wg. der Verschraubung. Ist das eine Eigenkonstruktion oder hast Du fertige Komponenten (Sensorbuchse, Wanddurchführung) genommen?
Danke vorab,
dmq
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Sonntag 24. Mai 2020, 10:45
von dmq
Entschuldigt: ich hätte auch eigenständig von Anfang an besser suchen können. Wer Interesse hat, einfach mal nach "Aviation Connectors" suchen (GX16, GX20) ...
Werde mir mal welche bestellen.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Dienstag 26. Mai 2020, 15:27
von Sir Quickly
@dmq
Die M8-Steckverbinder sind halt relativ kompakt im Vergleich zu XLR und GX16/20. Auf Seite det Yato spielt das zwar eine eher untergeodnete Rolle, auf Seite der Steuerung war das für mich wichtig.
Verwendet have ich :
- Einbau-Stecker: Lutronic 0831 04 T10CP
- Einbau-Buchse: Lutronic 0821 04 T10CP
Das kriegt man beides u.a. bem Reichelt.
Was aussieht wie ein Zahnrad, ist eine normale Fächerscheibe, die das Verdrehen verhindert, wenn das Kabel geschraubt wird.
Grüße,
Roland
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Dienstag 26. Mai 2020, 22:00
von dmq
Danke fürs teilen Roland. Das hilft.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 27. Mai 2020, 08:43
von JoGr
Vielen Dank für die Info
Grüße
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 27. Mai 2020, 09:49
von juju1337
Kann ich deinen Umbau so auch ohne Extra-Platine für den RaspberryPi mit CBPi3 verwenden? Welche GPIOs würden denn dann auf J1 liegen und wie konfigurierst du das dann in CBPi?
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 28. Mai 2020, 06:13
von Sir Quickly
Der Raspberry hat 3V3 GPIOs, die Optokoppler werden bei mir aber über 5V betrieben. Das haut also so nicht ohne weiteres hin.
Auch ist es generell gute Praxis, GPIOs vom Pi, die nach außen gehen, zu buffern, um den Prozessor zu schützen, z.B. gegen ESD, Überspannungen beim Schalten von induktiven Lasten, Kurzschlüssen... Schlimmstenfalls würde sowas den Pi beschädigen
Auch ist die Stromfähigkeit der GPIOs limitiert, ich glaube 16mA pro Pin und 50mA in Summe.
Bspw. wird für den PI oft ein ULN280x benutzt. Ich verwende nen Standard-NPN-Transistor.
Welche GPIOs du benutzt, ist eigentlich egal, solange du sie CBPI konfigurieren kannst.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 28. Mai 2020, 07:51
von juju1337
Und wie konfigurierst du die in CBPi? Als normaler Heater mit Hysterese? Dann ist ja nur ein GPIO angesteuert, du hast ja ON_OFF und POWER_CTRL.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 28. Mai 2020, 08:19
von irrwisch
Hättest du Lust die Schaltung für die Raspi Platine sowie die
Hendi Platine zu teilen? Am besten direkt als CAD Files.
Ich hätte direkt Lust mir das nachzubauen

Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 28. Mai 2020, 20:42
von dmq
Vielleicht könnte man es auch als PCB in Auftrag geben :)
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Montag 1. Juni 2020, 21:14
von Sir Quickly
@juju1337
Der Aktor des Kessels bedient ON_OFF,
PWR_CTRL ist ein freier Aktuator, der keinem Kesael zugeordnet und als GPIO_PWM konfiguriert ist. Der wird bei Bedarf statisch bedient, wobei ich bei Maischen eh immer 100% fahre. Überschwingen tut bei mir die Temperatur fast nicht, darum nutze ich das PID Plugin nicht.
@irrwisch
Ist in einem separaten Thread geplant, sobald ich etwas Zeit dafür habe.
@dmq
Ein Layout der Yato-Platine hab ich nicht, aber die KiCAD-Filer kann ich gerne zur verfügung stellen.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Dienstag 2. Juni 2020, 21:02
von dmq
Klasse, wenn Du die KiCAD Dateien hinterlegen kannst, wäre das hilfreich - danke vorab.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Dienstag 2. Juni 2020, 21:09
von juju1337
Okay, aber wenn du eh 100% fährst, dann ist der Schaltungsaufwand aber fast übertrieben, oder? Dann würde ja ON/OFF reichen und Leistung regeln an der Hendi/YATO.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 3. Juni 2020, 15:13
von Sir Quickly
Musst natürlich du entscheiden, ob du es brauchst oder nicht. Ist halt eine Möglichkeit, eine einigermassen definierte Leistung einzustellen, wenn die LCD-Anzeige vom Kessel verdeckt ist.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Freitag 5. Juni 2020, 17:58
von Sir Quickly
So, den KiCAD-Container findet Ihr hier:
https://github.com/Sir-Quickly/Yato_Con ... s/tag/v1.0
Neben dem Schaltplan hab ich noch ein Quick- und Dirty-Layout gemacht. Diese Layout ist zwar nicht getestet, das Risiko sollte sich aber in Grenzen halten.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Samstag 27. Juni 2020, 22:08
von juju1337
Sind das eigentlich JST XH Stecker in der YATO/HENDI? Hab das die Tage nachgebaut, aber bin noch auf Molex...
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Sonntag 28. Juni 2020, 09:06
von dmq
@Roland, danke fürs Veröffentlichen - das hatte ich verpennt :)
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Montag 29. Juni 2020, 17:05
von Sir Quickly
Ja, das sind JST XH Steckverbinder in der Yato.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 08:34
von hiasl
Servus Roland,
ich habe die Schaltung nachgebaut. Dann habe ich alles mal durchgemessen. Auf der sicheren Seite Spannungsversorgung über der CBPi, auf der anderen Seite über ein separates Labornetzteil. Jeweils 5 V=. On_Ext führt wie es soll zu +5 V auf J3.1. 100 % GPIO_PWM auf Pwr_Ctrl_Ext führt aber nur zu ca. +0,9 V auf J3.2. Stimmt das denn? Das Poti der Hendi regelt doch normalerweise 0-5 V, oder? Direkt am Optokoppler habe ich auch 0-5 V, je nach PWM. Nach R3 fällt die Spannung dann aber auf 0,9 V ab.
Noch was anderes: Eigentlich sind vom Poti doch 0 V Signal = 3500 W = 100 % und 5 V = 500 W = 0 %. Bei der Schaltung müsste man dann doch im Prizip eine inverse PWM nutzen, oder?
Vielen Dank für deine Unterstützung.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 12:40
von juju1337
hiasl hat geschrieben: Mittwoch 8. Juli 2020, 08:34
Jeweils 5 V=. On_Ext führt wie es soll zu +5 V auf J3.1. 100 % GPIO_PWM auf Pwr_Ctrl_Ext führt aber nur zu ca. +0,9 V auf J3.2. Stimmt das denn? Das Poti der
Hendi regelt doch normalerweise 0-5 V, oder? Direkt am Optokoppler habe ich auch 0-5 V, je nach PWM. Nach R3 fällt die Spannung dann aber auf 0,9 V ab
Ich hab sie auch nachgebaut und bei mir ist es genauso. Ergibt, wenn man die Schaltung anschaut, auch Sinn: 100% PWM bedeutet ja konstant 5V am Optokoppler, mit R3 und R4 hast du dann einen Spannungsteiler auf ~0,9V über R4. Ich hätte allerdings auch vermutet, dass das Poti 0-5V regelt. Warum das also so funktioniert in der Praxis weiß ich auch nicht.
hiasl hat geschrieben: Mittwoch 8. Juli 2020, 08:34
Noch was anderes: Eigentlich sind vom Poti doch 0 V Signal = 3500 W = 100 % und 5 V = 500 W = 0 %. Bei der Schaltung müsste man dann doch im Prizip eine inverse PWM nutzen, oder?
Hätte ich auch gedacht. Vielleicht kann Roland uns hier aufklären...

Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 13:01
von juju1337
Laut
https://github.com/Manuel83/craftbeerpi ... 0-M--Setup sind 3500W bei 0,8V, das würde also schon mal einen Hinweis geben... Aber warum das nicht invertiert ist und wie ich da dann auf die 5V kommen soll bei "0%", versteh ich noch nicht...
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 14:55
von hiasl
juju1337 hat geschrieben: Mittwoch 8. Juli 2020, 12:40
Ich hab sie auch nachgebaut und bei mir ist es genauso. Ergibt, wenn man die Schaltung anschaut, auch Sinn: 100% PWM bedeutet ja konstant 5V am Optokoppler, mit R3 und R4 hast du dann einen Spannungsteiler auf ~0,9V über R4. Ich hätte allerdings auch vermutet, dass das Poti 0-5V regelt. Warum das also so funktioniert in der Praxis weiß ich auch nicht.
Hast du es denn schon an der
Hendi ausprobiert oder auch nur gemessen?
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 15:02
von juju1337
Nur gemessen bisher. Aber ich wüsste auch nicht, wie da theoretisch jemals 5V ankommen sollen...
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 16:08
von JackFrost
Bei dem Bild von Github liegen die 5V bei PWM low über beide Widerstände R5 und R6 an. Bei High fließt die Ladung vom Elko über den 4k7 ab. Durch das Tiefpassverhalten wird aus der PWM dann die Analoge Spannung.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 16:11
von juju1337
Ja, da versteh ich es, aber bei Rolands Aufbau kann ich das nicht nachvollziehen
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 16:48
von JackFrost
juju1337 hat geschrieben: Mittwoch 8. Juli 2020, 16:11
Ja, da versteh ich es, aber bei Rolands Aufbau kann ich das nicht nachvollziehen
Auf der Platine von Roland sind nur 4 von 5 Widerständen aus dem Schaltplan verlötet. Vermutlich ist der 1k Widerstand hinter dem 100 nF Kerko nicht verbaut.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 16:56
von juju1337
JackFrost hat geschrieben: Mittwoch 8. Juli 2020, 16:48
Auf der Platine von Roland sind nur 4 von 5 Widerständen aus dem Schaltplan verlötet. Vermutlich ist der 1k Widerstand hinter dem 100 nF Kerko nicht verbaut.
Gruß JackFrost
Ein kleines aber feines Detail...
Das würde die 0,9V statt 5V erklären, aber immer noch nicht, warum hier nicht eine invertierte PWM anliegt und eigentlich sollte dann ja auch bei PWM off ja nicht 0V sondern eben 0,8V anliegen...
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 17:18
von JackFrost
juju1337 hat geschrieben: Mittwoch 8. Juli 2020, 16:56
JackFrost hat geschrieben: Mittwoch 8. Juli 2020, 16:48
Auf der Platine von Roland sind nur 4 von 5 Widerständen aus dem Schaltplan verlötet. Vermutlich ist der 1k Widerstand hinter dem 100 nF Kerko nicht verbaut.
Gruß JackFrost
Ein kleines aber feines Detail...
Das würde die 0,9V statt 5V erklären, aber immer noch nicht, warum hier nicht eine invertierte PWM anliegt und eigentlich sollte dann ja auch bei PWM off ja nicht 0V sondern eben 0,8V anliegen...
Das liegt am Anschluss von Optokoppler. Die PWM liegt an der Kathode an. Damit schaltet der Optokoppler bei Low und noch hat bei High durch.
Ohne R3 ist es aber fraglich wie die Ladung von Kondensator abfließen kann bei High. Vielleicht ist der Input Bias der
Hendi groß genug. Bei 100k wären fünfmal tau 50 s. Also eine 50 s Ranle von 100 auf 0%.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 18:34
von juju1337
Hmmm, da liegt wahrscheinlich der Hund begraben. Dann wär natürlich sehr interessant wie J1 auf Seiten des Pi beschaltet ist. Ich habe für beide Signale (On_ext und Pwr_Ctrl_ext) da einen Open Collector (BC337) an den GPIOs und ziehe damit die Kathode des Optokopplers jeweils auf GND, wenn der GPIO low ist. Sorum geht's dann natürlich nicht. Die Frage ist, wie ich das jetzt fixe...
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 18:47
von JackFrost
Über die beiden BC337 und 4 Widerstände kannst du das fixen.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 18:53
von juju1337
JackFrost hat geschrieben: Mittwoch 8. Juli 2020, 18:47
Über die beiden BC337 und 4 Widerstände kannst du das fixen.
Gruß JackFrost
Örgs, wie denn? Ich dachte jetzt eher daran, die Schaltung in Richtung des GitHub-Plans umzubauen.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 19:02
von JackFrost
Ich schick dir heute Abend was, bin noch nicht zuhause.
Kannst du kurz skizzieren wie die Eingänge zum Optokoppler aussehen ?
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 19:04
von juju1337
Mach ich gleich
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 19:42
von juju1337
So schaut das bei mir momentan aus. Ich hoffe es ist halbwegs leserlich...
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 20:21
von JackFrost
Hi,
ich hab es schnell mit Greenshot gemacht, ich denke du erkennst was ich meine. Es geht mit nur zwei Änderungen.
Wenn es Lochraster ist sollte das machbar sein.
DIe Änderungen an der rechten Seite sind nur nötig, wenn der Kondensator nicht entladen werden kann oder nur zu langsam,
so das der Stellgrad zu langsam sinkt.
Der Widerstand sollte den gleichen Wert haben wir der vom Filter.
Für die Diode reicht eine Wald und Wiesen Si Diode.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 22:00
von juju1337
Danke, probier ich aus! Mit rechter Seite meinst du alles rechts vom Optokoppler?
Und: Wenn ichs richtig sehe, brauch ich die Inversion bei ON_EXT nicht? Gibt das original Poti für "An" also 5V aus?
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 22:15
von hiasl
juju1337 hat geschrieben: Mittwoch 8. Juli 2020, 22:00
Danke, probier ich aus! Mit rechter Seite meinst du alles rechts vom Optokoppler?
Und: Wenn ichs richtig sehe, brauch ich die Inversion bei ON_EXT nicht? Gibt das original Poti für "An" also 5V aus?
Jo, das ist so.
Du könntest aber auch das invert PWM Modul des CBPi nutzen. Dann sparst du dir die Korrektur links.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 22:16
von JackFrost
juju1337 hat geschrieben: Mittwoch 8. Juli 2020, 22:00
Danke, probier ich aus! Mit rechter Seite meinst du alles rechts vom Optokoppler?
Genau, den Block rechts vom Optokoppler.
Bei langsamer PWM reicht eine einfache Si Diode.
Wenn die PWM höher ist dann eher eine Schottky Diode.
Ab 1 kHz würde ich eher eine Schottky Diode nehmen.
Wenn der Tiefpass, die Regelung zu sehr dämpft, dann kann man das neu rechnen und anpassen. Es reicht dann den Kondensator zu tauschen.
Tau ( Zeitkonstante des RC-Gliedes ) ist abhängig von der PWM Frequenz, Es darf nicht zu klein sein und sollte nicht zu hoch sein.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 22:21
von JackFrost
hiasl hat geschrieben: Mittwoch 8. Juli 2020, 22:15
juju1337 hat geschrieben: Mittwoch 8. Juli 2020, 22:00
Danke, probier ich aus! Mit rechter Seite meinst du alles rechts vom Optokoppler?
Und: Wenn ichs richtig sehe, brauch ich die Inversion bei ON_EXT nicht? Gibt das original Poti für "An" also 5V aus?
Jo, das ist so.
Du könntest aber auch das invert PWM Modul des CBPi nutzen. Dann sparst du dir die Korrektur links.
Dann ist aber das System nicht "fail safe". Wenn das Signal low oder oder der Pin Hi-Z ist, dann wird geheizt. Rebootet also der
Raspi wird in der Zeit geheizt. Mit der Änderung wird nicht geheizt, wenn der Pin Hi-Z oder low ist.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 23:32
von Sir Quickly
Hallo zusammen,
Also, R3 und R4 habe ich schon bestückt, also alle 5 Widerstände. Der R3 ist schwer erkennbar, er ist als 0805-SMD-Widerstand auf der Lötseite ausgeführt.
Ich glaube, auf der Skizze hier habe ich die Werte von R3 und R4 vertauscht. Der Ableitwiderstand R4 sollte 4k7 sein, der Serienwiderstand 1k0. Ob man die 4k7 überhaupt braucht, weiß ich auch nicht, ich kenne den Eingangswiderstand der Hendi im Betrieb nicht, würde aber mal von einem ziemlich grossen ausgehen.
Damit ergibt sich ein Spannungsbereich der analogen Spannung von 0V (PWM 0, entspricht 3500W) bis etwa 4,1V (PWM=100%, das sind bei mir 600W, 500W erreiche ich nicht ganz, ist aber für mich nicht so relevant). Aber man kann da sicher nochwas an der Fimensionierung Elko, R3 und R4 rumspielen, natürlich in Abhängigkeit von der PWM-Frequenz.
Die Polarität der PWM ist so gewählt, um bei nicht genutzten PWM-Eingang volle Leistung zu haben. Ihr habt recht, der Zusammenhang zwischen PWM und Leistung ist invers, er muss ja aber auch nicht 1:1 sein.
Falls ihr andersrum braucht, kömmte man den Elko über einen Widerstand nach 5V laden und über den Transistor, am besten mit einem kleinen Serienwiderstand, des Optokopplers entladen.
Gruss,
Sir Quickly
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Mittwoch 8. Juli 2020, 23:46
von JackFrost
Sir Quickly hat geschrieben: Mittwoch 8. Juli 2020, 23:32
Hallo zusammen,
Also, R3 und R4 habe ich schon bestückt, also alle 5 Widerstände. Der R3 ist schwer erkennbar, er ist als 0805-SMD-Widerstand auf der Lötseite ausgeführt.
Ich glaube, auf der Skizze hier habe ich die Werte von R3 und R4 vertauscht. Der Ableitwiderstand R4 sollte 4k7 sein, der Serienwiderstand 1k0. Ob man die 4k7 überhaupt braucht, weiß ich auch nicht, ich kenne den Eingangswiderstand der
Hendi im Betrieb nicht, würde aber mal von einem ziemlich grossen ausgehen.
Damit ergibt sich ein Spannungsbereich der analogen Spannung von 0V (PWM 0, entspricht 3500W) bis etwa 4,1V (PWM=100%, das sind bei mir 600W, 500W erreiche ich nicht ganz, ist aber für mich nicht so relevant). Aber man kann da sicher nochwas an der Fimensionierung Elko, R3 und R4 rumspielen, natürlich in Abhängigkeit von der PWM-Frequenz.
Die Polarität der PWM ist so gewählt, um bei nicht genutzten PWM-Eingang volle Leistung zu haben. Ihr habt recht, der Zusammenhang zwischen PWM und Leistung ist invers, er muss ja aber auch nicht 1:1 sein.
Falls ihr andersrum braucht, kömmte man den Elko über einen Widerstand nach 5V laden und über den Transistor, am besten mit einem kleinen Serienwiderstand, des Optokopplers entladen.
Gruss,
Sir Quickly
Das erklärt es, dann passt alles. Ohne den 4k7 würde ich es dann nicht probieren. Der Eingangswiderstand am ADC wird vermutlich sehr hoch sein, damit würde die Spannung immer auf 4,1V bleiben.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 9. Juli 2020, 07:28
von juju1337
Danke, Roland, das ergibt Sinn!
Also dann nochmal zusammengefasst:
1. R3 und R4 tauschen, dann sollte der Spannungsbereich passen.
2. Um die PWM zu invertieren:
a) Modifikation nach JackFrost
b) Modifikation nach SirQuickly
c) PWM softwareseitig invertieren (non-fail-safe)
Ich werde es mal mit 1 und 2b) probieren, zum Testen erstmal mit 2c)
Danke euch!
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 9. Juli 2020, 07:42
von hiasl
Sir Quickly hat geschrieben: Mittwoch 8. Juli 2020, 23:32
Die Polarität der PWM ist so gewählt, um bei nicht genutzten PWM-Eingang volle Leistung zu haben. Ihr habt recht, der Zusammenhang zwischen PWM und Leistung ist invers, er muss ja aber auch nicht 1:1 sein.
Falls ihr andersrum braucht, kömmte man den Elko über einen Widerstand nach 5V laden und über den Transistor, am besten mit einem kleinen Serienwiderstand, des Optokopplers entladen.
Ok, das könnte man aber auch wieder mit dem Modul Groups lösen.
JackFrost hat geschrieben: Mittwoch 8. Juli 2020, 22:21
hiasl hat geschrieben: Mittwoch 8. Juli 2020, 22:15
Jo, das ist so.
Du könntest aber auch das invert PWM Modul des CBPi nutzen. Dann sparst du dir die Korrektur links.
Dann ist aber das System nicht "fail safe". Wenn das Signal low oder oder der Pin Hi-Z ist, dann wird geheizt. Rebootet also der
Raspi wird in der Zeit geheizt. Mit der Änderung wird nicht geheizt, wenn der Pin Hi-Z oder low ist.
Gruß JackFrost
Das verstehe ich nicht. Wenn die Platte aus ist, dann ist ja die PWM resp. PWR_Ctrl wirkungslos. Muss allerdings dazu sagen, dass ich für das Ein/Aus ein Relaisboard verwende.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 9. Juli 2020, 07:55
von juju1337
In der Schaltung ist die Platte aber an, wenn ON_Ext high ist (also der Raspi eingeschaltet hat) und würde dann auf voller Leistung laufen. Du müsstest also immer manuell runterregeln bzw. die PWM einschalten. Wenn du per Poti anschaltest, dann sollte es passen.
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 9. Juli 2020, 08:00
von JackFrost
Kommt drauf an wie der On_ext ist. Wenn der auch low active ist dann wäre ein booten schlecht mit High active, dann wäre nur ein Kabelbruch schlecht.
Bin es halt von der Arbeit gewohnt das alles fail safe sein muss.
Um die Plate ohne Raspi und ohne den Multiplexer zu nutzen reicht eine kleine Platine mit einem 555 und bisserl Hühnerfutter.
Gruß JackFrost
Re: Vorstellung Umbau Yato/Hendi für Automatisierung
Verfasst: Donnerstag 9. Juli 2020, 10:06
von hiasl
Nachdem ich sowieso ein Relais Board habe, lasse ich On/Off darüber laufen.
Aber in der Schaltung ist das für PWR_EXTdoch auch korrekt dargestellt. Wenn der GPIO Low ist, dann ist auch der Opto Low. Kein Schaltsignal vorhanden und Platte damit aus. Da ist es für PWR_CTRL bzw. PWM irrelevant, ob da was kommt oder nicht.